In a world where upgrades and advancements are constant, it is easy to overlook older technology in favour of newer, more advanced options. However, the case of 8051 microcontrollers defies
In a world where upgrades and advancements are constant, it is easy to overlook older technology in favour of newer, more advanced options. However, the case of 8051 microcontrollers defies

When designing or debugging an electrical or electronics device, it is very important to know the values of the components that have been used on board. With a multimeter most
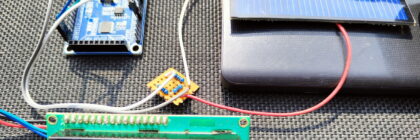
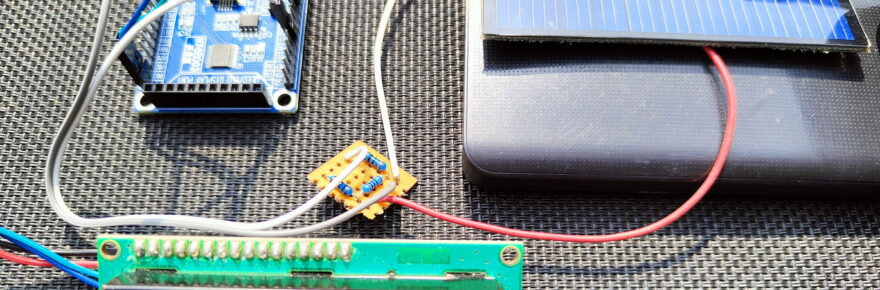
A pyranometer or solar irradiation tester is measurement tool that is a must-have for every professional in renewable energy sector. However, owing one is not easy because it is both
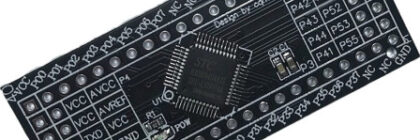
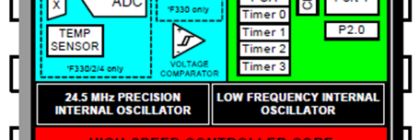
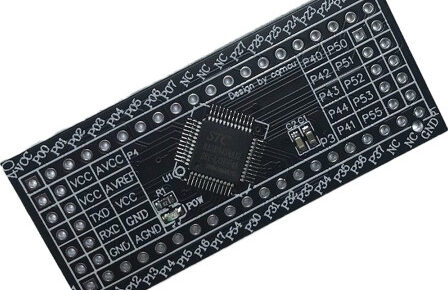
About STC8A8K64S4A12 Microcontroller and its Development Board This is the continuation of my first post on STC 8051 Microcontrollers here. Many Chinese microcontroller manufacturers develop awesome and cheap general-purpose MCUs

With the grand success of CROWPI2, an all-in-one portable Raspberry Pi Laptop development platform, Elecrow has now come up with Crowbits: easy-to-use electronic building blocks for young inventors. Crowbits include

When it comes to STEAM (Science, technology, engineering, art and math) education, the Raspberry Pi is perhaps the most affordable, powerful, and versatile learning tool for all ages and skill
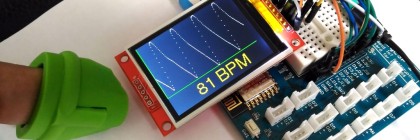
With the rapid development and maturing of internet-of-things (IoT) technology, the IoT-driven smart sensors and systems are changing business in multiple industries. In healthcare industry, it is gaining more attention lately because of
In a world where upgrades and advancements are constant, it is easy to overlook older technology in favour of newer, more advanced options. However, the case of 8051 microcontrollers defies

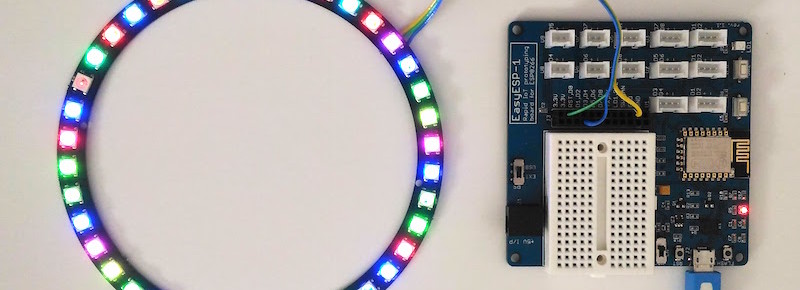
EasyESP-1 is a rapid prototyping development board for the low-cost, WiFi-enabled ESP8266 microcontroller. With an onboard USB-to-Serial converter pre-installed, EasyESP-1 does not require any additional hardware to download your application firmware

A Real Time Clock (RTC) is a timing element dedicated for keeping time. In many applications, especially where precise timed-operations are needed to be performed, a RTC is a very











